









(in 3.17.2 LIVE build 8148301)
Ein Beitrag von Chhris*, Alaska_Seadeleare, Krovax, Siruck und Tiegerhai.
*Für Fragen/Kritik/Anregungen zu diesem Artikel.
Inhaltsverzeichnis
- Begriffsdefinitionen
- Zusammenfassung
- Experimentelle Durchführung
- Ergebnisse
- Diskussion und Schlussfolgerungen
- Quellenverzeichnis
1. Begriffsdefinitionen
Ping-Reichweite bzw. Ping-Grenze (ping range)
Maximaldistanz in [m] oder [km], bis zu der unter anzugebenden Bedingungen ein (Echo des) Ping-Signal(s) von einem abbaubaren Objekt/Stein im Cockpit registriert werden kann. Die Ping-Reichweite kann dabei grundsätzlich abhängig sein vom Schiffstyp, dessen eingebauten Radar- und Scanner-Komponenten, sowie der jeweils verwendeten Radar- und Scanner-Einstellungen, was u.a. Gegenstand dieser Untersuchungen ist. Aus Gründen der Vollständigkeit sollten zusätzlich Ortsangaben, insbesondere zur Unterscheidung zwischen Scans auf Oberflächen von Monden/Planeten und in Asteroidengürteln, nicht fehlen.
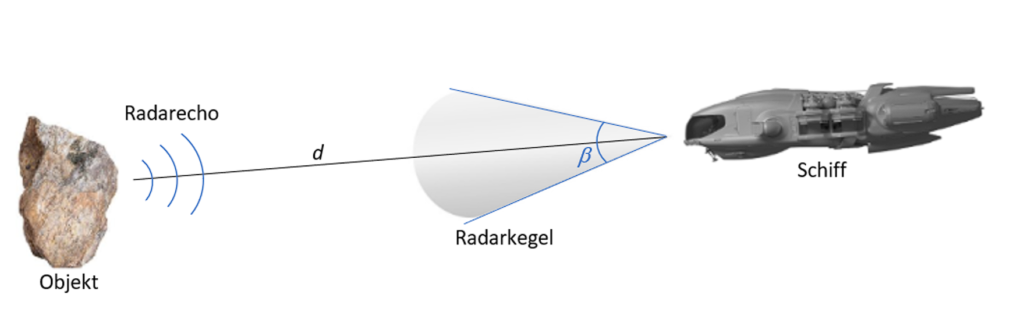
Ping-Winkel (ping angle oder ping FOV – field of view)
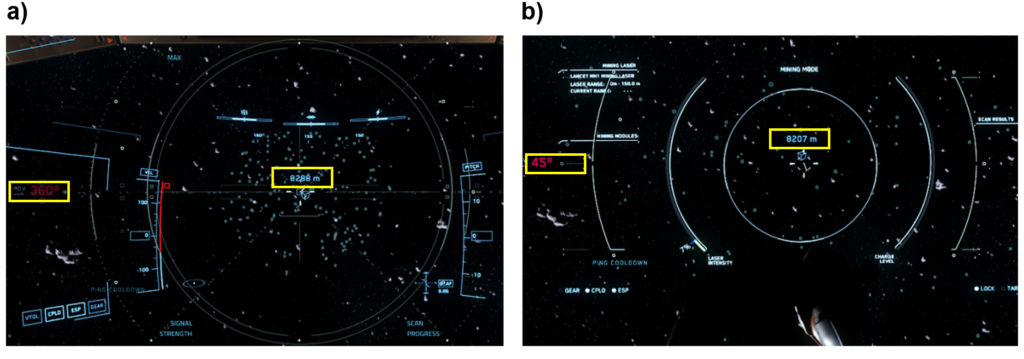
Der Winkel unter dem ein Ping (per “TAB”) erfolgt. Dieser kann im Scan-Modus und, sofern vorhanden, auch im Mining-Modus standardmäßig mit “,” (Komma) vergrößert und mit “.” (Punkt) verkleinert werden und die Werte 360°, 179°, 90°, 45°, 22°, 11°, 5° und 2° annehmen. Er wird bei Veränderung in beiden Modi im HUD angezeigt (s. Abb. 1)
Signalstärke (signal strength)
Die im Cockpit eines Schiffes im Scan-Modus angezeigte Stärke des (Echos eines) Ping-Signals in % (s. Abb. 2).

Scan-Angle bzw. Scan-Sichtfeld (scan FOV – field of view)
Die Größe des Scan-Winkels oder präziser der Durchmesser des Scan-Sichtfeldes (innerer Doppelkreis in der Anzeige) im Scan-Modus (kann mit dem mittleren Mausrad verändern werden) nach Abb. 2. Da keine quantitative Skala verfügbar ist, werden im Folgenden nur die Min- (kleinster Kreis) und Max- (größter Kreis) Einstellungen verwendet.
Scan-Stufe (scan level)
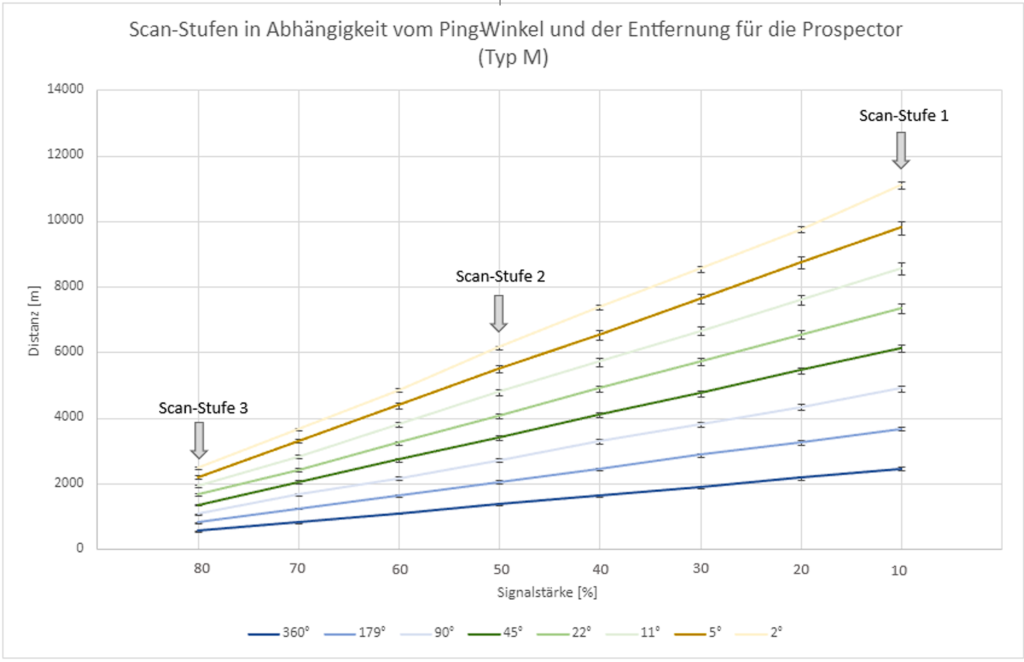
Es gibt 3 Scan- oder Informationsstufen für abbaubare Steine (dies gilt auch für andere Objekte): Bei der ersten wird die Masse des Objektes angezeigt. Dies geschieht bei einer Signalstärke von 10%. Bei der zweiten Scan-Stufe werden zusätzlich zur Masse einige Eigenschaften des Objekts angezeigt, u.a. Instability und Resistance. Dies geschieht bei einer Signalstärke von 50% und unabhängig davon, ob es sich um Oberflächengestein oder Asteroiden handelt. Gleiches gilt für die dritte Scan-Stufe, die bei 80% liegt und bei der zusätzlich Angaben zum Mineralgehalt des Steins oder Asteroiden erfolgen. Die Scan-Ergebnisse werden den Stufen entsprechend aufeinanderfolgend im Cockpit-HUD angezeigt (s. Abb. 2).
Gesteinsklasse (rock class)
Unterscheidung der Klassen 1,2 und 3 für Objekte/Steine, die mit Schiffen (ship mineables), Fahrzeugen (vehicle mineables) oder per Hand (hand mineables) abgebaut werden können.
| Gesteine der | Abbau per | Abbau durch |
| Klasse 1 | Schiff | Prospector, Mole |
| Klasse 2 | Fahrzeug | ROC DS, ROC |
| Klasse 3 | Hand | Greycat Multitool + Mining Aufsatz |
Cockpit-Marker
In Star Citizen finden verschiedene Cockpit-Marker Verwendung. Für den Bereich Bergbau sind wichtig:
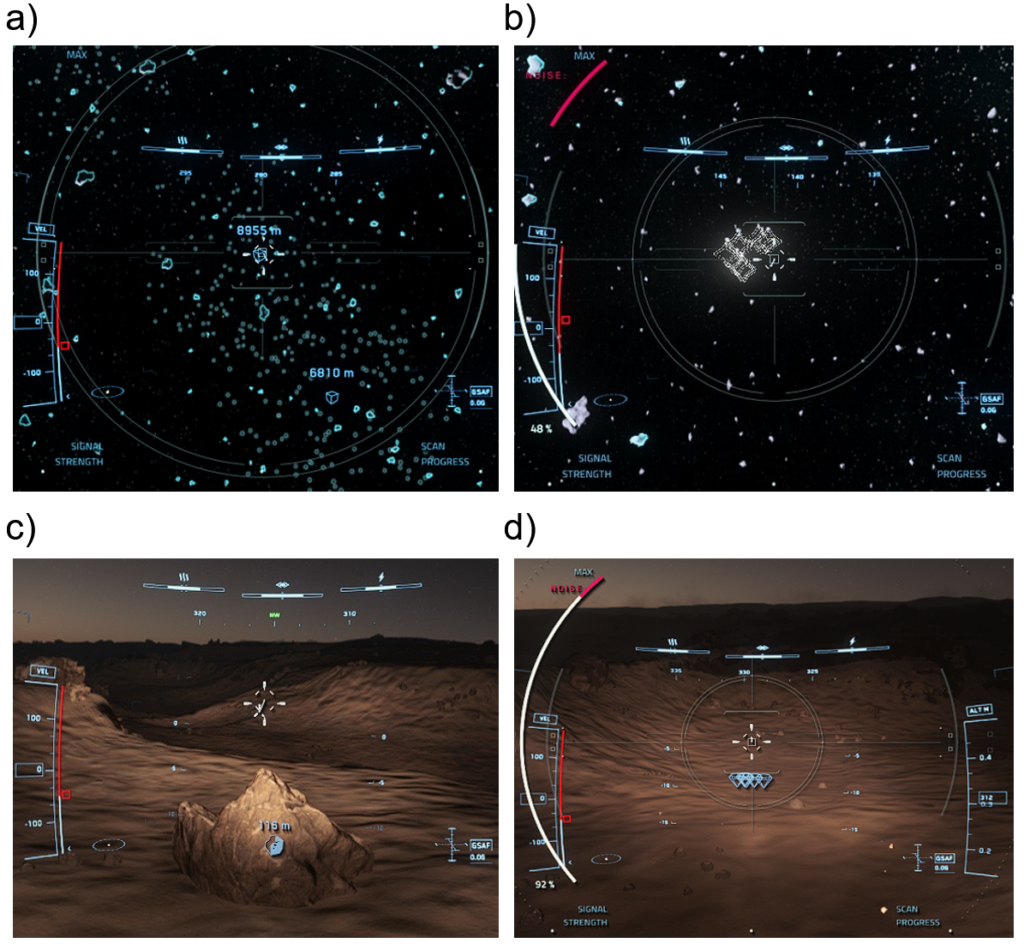
- a. 3D-Box-Marker
Dieser Marker in Form eines perspektivischen 3D-Würfels (s. Abb. 3a) wird verwen-det, um ein Gesteinsvorkommen anzuzeigen. Dabei handelt es sich in der Regel um Klasse-1- oder Klasse-2-Gesteine. Dieser Marker erscheint auf dem HUD im Cockpit typischerweise nachdem das Echo von Ping-Signalen empfangen wurde. In der Regel wird er von einer Punktwolke umgeben. Zusätzlich ist er mit einer Entfernungsangabe in [km] oder [m] versehen. Das 3D-Box-Symbol wird im Fall eines einzelnen Gesteins durch Scannen irreversibel in ein Stein- oder Diamantsymbol aufgelöst. Handelt es sich um ein Vorkommen mehrerer Gesteine, so wird ein 3D-Box-Marker in Abhängigkeit von der Entfernung reversibel zu mehreren Rauten-Markern aufgelöst bzw. durch Scannen irreversibel in mehrere Stein- oder Diamantsymbole. Lage und Entfernung eines 3D-Box-Symbols können sich bei wiederholtem Scannen in geringem Ausmaß verändern. Die Entfernungen und Bedingungen, bei denen dies geschieht, sind Gegenstand dieser Untersuchung
- b. Weißer Rauten-Marker
Ein 3D-Box-Marker wird wie unter a) beschrieben bei bestimmten Entfernungen, die Gegenstand dieser Untersuchungen sind, in einen oder mehrere weiße Rauten-Marker (s. Abb. 3b) aufgelöst, die die exakte Position von Einzelgesteinen angeben. Bei genauer Betrachtung lässt sich erkennen, dass auch Rauten-Marker mit einer Entfernungsangabe in [m] versehen sind. Erhöht man den Abstand zum Objekt, so werden ein oder mehrere Rauten-Marker reversibel wieder in einen 3D-Box-Marker verwandelt und umgekehrt. Dazu ist in der Regel allerdings ein erneuter Ping erfor-derlich. Wird ein Einzelgestein gescannt, verschwindet die reversible Umwandlung von Box- und Rauten-Marker ineinander und beide werden in ein Stein- oder Diamantsymbol aufgelöst. Handelt es sich um ein Vorkommen mehrerer Gesteine, so werden die Rauten-Marker bei weiterer Abstandsverringerung reversibel in Stein- oder Diamantsymbole aufgelöst. Scannen löst dies irreversibel auf.
- c. Stein- und Diamantsymbole
Diese Symbole (s. Abb. 3c) kennzeichnen die Gesteinsklasse und deren exakte Lage. Sie sind mit Entfernungsangaben versehen. Steinsymbole kommen nur bei Klasse-1-Gesteinen, Diamantsymbole bei Klasse-2- und Klasse-3-Gesteinen vor. Beide Symbole werden reversibel bei Entfernungsänderung in 3D-Box- oder Rauten-Marker umgewandelt. Wie auch bei a. und b. wird diese Umwandlung durch Scannen irreversibel aufgelöst. Die Entfernungen und Bedingungen, bei denen dies geschieht, sind ebenfalls Gegenstand dieser Untersuchung.
2. Zusammenfassung
Vorwort:
In der vorliegenden Arbeit werden die Ergebnisse von in-game Versuchen zur Ping- und Scanmechanik der 3.17.2 (LIVE Build 8148301) im Rahmen des Mining-Gameplays vorgestellt. Unser primäres Ziel ist es, die organisationsinternen Abteilungen der SCIUN und unsere interessierten Spieler darin zu unterstützen, die aus dieser Untersuchung folgenden Erkenntnisse vorteilhaft für ihre individuellen Zwecke einzusetzen. Ziel ist aber auch, die in der SC-Community bereits bekannten und angewendeten Mining-Strategien, auf deren Urheber wir im Quellenverzeichnis verweisen, datenbasiert zu untermauern. All dies geschieht aus Spielspaß und Interesse, sowie ohne Anspruch auf Fehlerfreiheit und Vollständigkeit.
Ergebnisse:
Ping-Reichweite
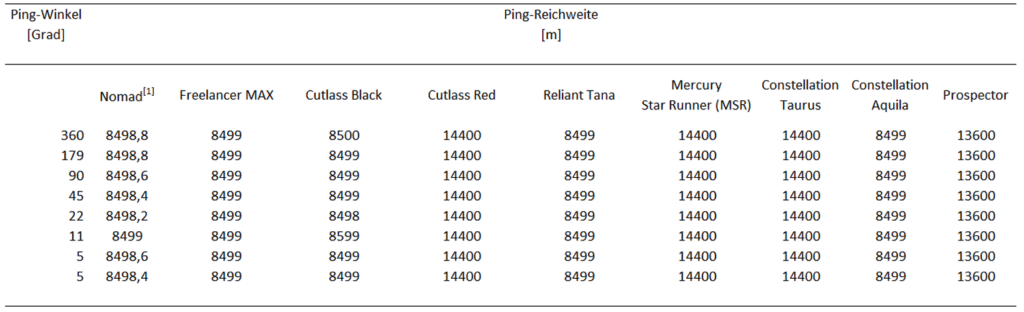
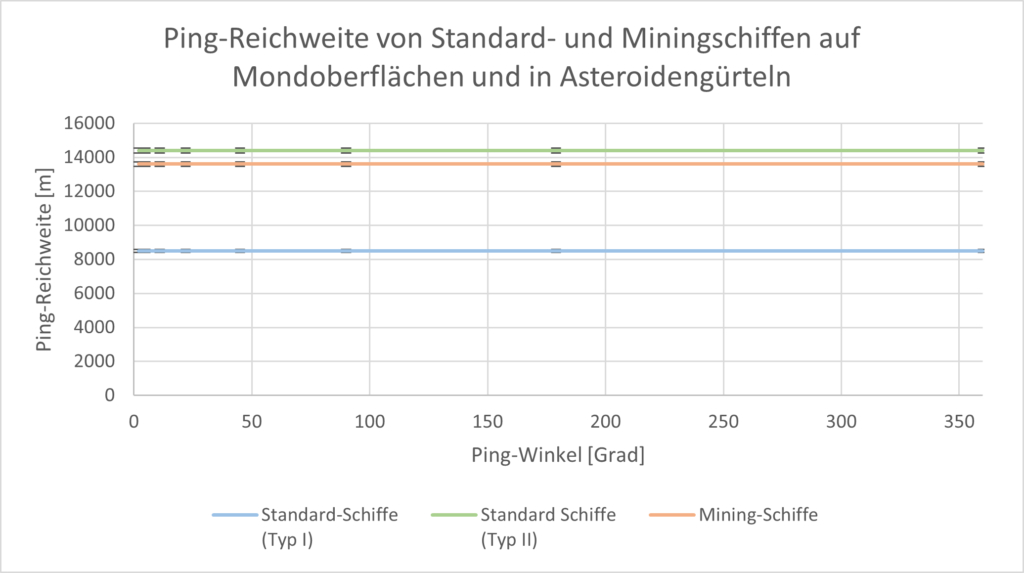
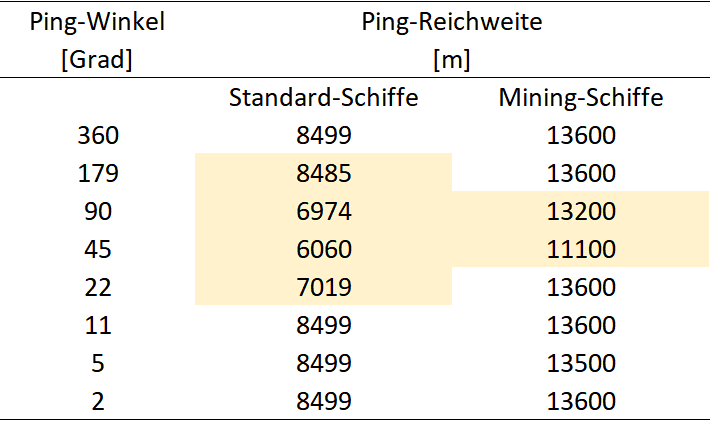
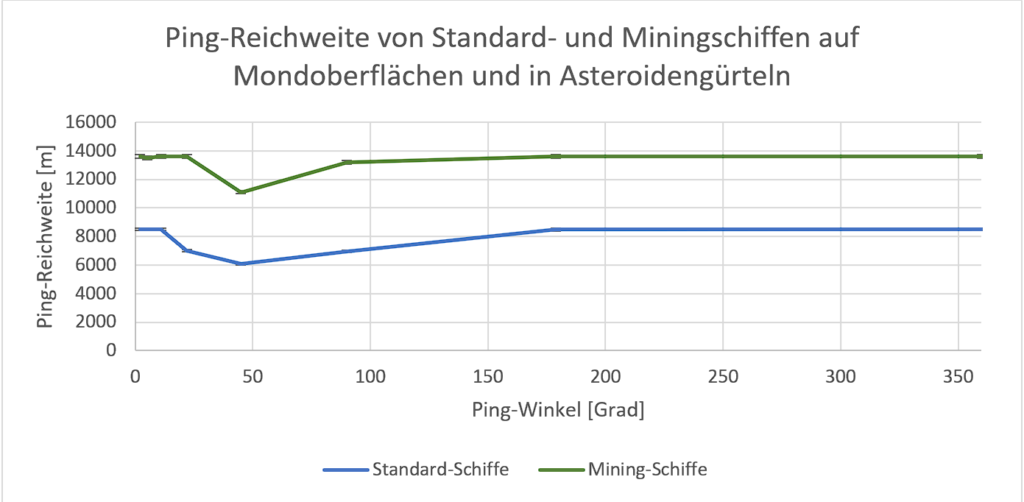
- 1. Klasse-1-Gesteine, d.h. solche, die mit Mining-Schiffen abgebaut werden können, sind auf Mondoberflächen und in Asteroidengürteln mit Standard-Schiffen vom Typ I bis zu einer Entfernung von maximal 8.499 m +/- 1 m, mit der Prospector als Mining-Schiff bis zu einer Entfernung von maximal 13,6 km +/- 0,1 km detektierbar. Constellation Taurus, Mercury Star Runner und Cutlass Red zeigen als Vertreter der Standard-Schiffe des Typs II mit 14,4 km +/- 0,1 km die höchsten Reichweiten. In allen untersuchten Fällen ist die Ping-Reichweite im Gegensatz zu früheren Patches unabhängig vom Ping-Winkel.
- 2. Unter Umständen können Anomalien in der Ping-Reichweite auftreten. Diese sind dadurch gekennzeichnet, dass die zu erwartende Maximaldistanz, bis zu der ein Gestein detektiert werden sollte, unterschritten wird. Dies tritt nach unseren Beobachtungen vornehmlich im Bereich unterer Ping-Winkel auf. Wir bezeichnen diese Abweichungen nach ihrem Entdecker und SCIUN-Mitglied Alaska_Seadealare als Alaska-Anomalien.
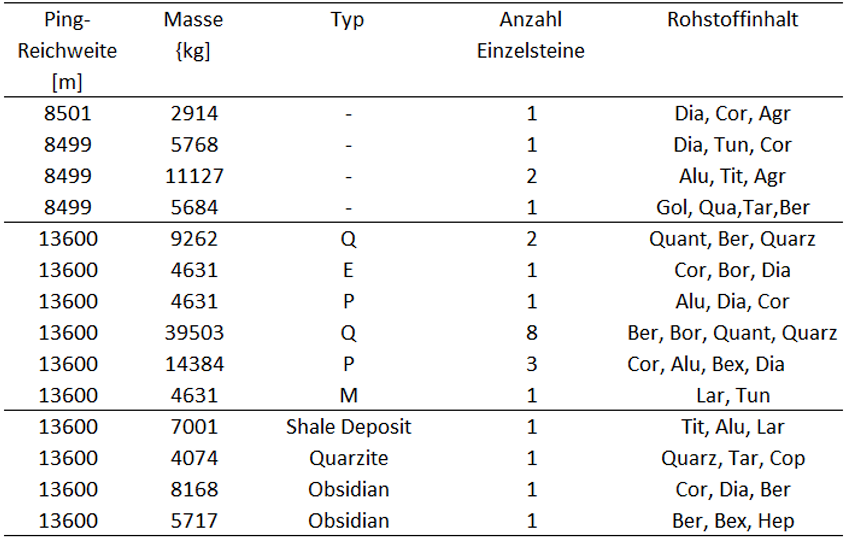
- 3. Die Massen, Anzahl Einzelsteine und Rohstoffinhalte von Klasse-1-Gesteinen haben keinen Einfluss auf die Detektionsreichweite. Daraus lässt sich schlussfolgern, dass alle Gesteinsvorkommen derzeit über die gleiche Signatur verfügen bzw. umgekehrt, dass die derzeit verfügbaren Radarkomponenten etwaige Signaturunterschiede nicht auflösen können.
- 4. Die in den hier untersuchten Standardschiffen verbauten und nach Hersteller, Größe und Anzahl teils unterschiedlichen Radar- und Scanner-Komponenten haben erkennbar keinen eindeutigen Einfluss auf die Ping-Reichweite bei Klasse-1-Gesteinen. Dies bedeutet, dass von den verbauten Komponenten nicht auf die erzielbaren Ping-Reichweiten geschlossen werden kann, sondern Schiffe individuell getestet werden müssen.
Signalstärken und Scan-Stufen
- 1. Die Signalstärke nimmt bei konstantem Ping-Winkel linear mit der Entfernung ab. Sie ist abhängig vom Ping-Winkel. Je kleiner dieser, umso größer ist die Entfernung zum Objekt bei gegebener Signalstärke.
- 2. Sämtliche Signalstärken eines gegebenen Schiffes und seiner Konfiguration sind bei Kenntnis der Entfernungsabhängigkeit für einen Ping-Winkel für alle anderen Ping-Winkel berechenbar und ebenso bei Kenntnis der winkelabhängigen Entfernungen bei konstanter Signalstärke.
- 3. Es gibt 3 Scan- oder Informationsstufen für abbaubare Steine: Bei der ersten, die bei einer Signalstärke von 10% liegt, wird die Masse des Objektes angezeigt. Bei der zweiten Scan-Stufe werden zusätzlich zur Masse einige Eigenschaften des Objekts angezeigt, u.a. die Stabilität. Diese liegt bei einer Signalstärke von 50%. An der dritten Scan-Stufe bei 80% werden zusätzlich Angaben zum Mineralgehalt des Steins oder Asteroiden erhalten.
Cockpit-Marker
- 1. 3D-Box-Marker tauchen stets an der Ping-Grenze auf und kennzeichnen allgemein ein Gesteinsvorkommen. Die Entfernung, bei der sie erscheinen ist, wie die Ping-Grenze selbst, lediglich abhängig vom Schiffstyp (I, II oder M). Bei weiterer Annäherung werden sie reversibel und in Abhängigkeit der Anzahl an Gesteinen in einen oder mehrere Rauten-Markern aufgelöst bzw. frühestens an der ersten Scan-Stufe irreversibel in mehrere Stein- oder Diamantsymbole. Lage und Entfernung eines 3D-Box-Symbols können sich bei wiederholtem Scannen in geringem Ausmaß verändern.
- 2. Weiße Rautenmarker erscheinen in Abhängigkeit vom eingestellten Ping-Winkel und damit der Entfernung zum Objekt. Sie können sich bei Abstandsänderung zum Objekt reversibel wieder in einen 3D-Box-Marker verwandeln und umgekehrt. Wird ein Einzelgestein gescannt, verschwindet diese reversible Umwandlung von Box- und Rauten-Marker ineinander und beide werden in ein Stein- oder Diamantsymbol aufgelöst. Handelt es sich um ein Vorkommen mehrerer Gesteine, so werden die Rauten-Marker bei weiterer Abstandsverringerung reversibel in Stein- oder Diamantsymbole aufgelöst. Scannen löst dies irreversibel auf.
- 3. Wie bei 3D-Box-Markern ist auch die Entfernung, bei der Stein- und Diamantsymbole auftauchen, lediglich abhängig vom Schiffstyp (I, II oder M) und für alle Ping-Winkel gleich. Beide werden reversibel bei Entfernungsänderung in 3D-Box- oder Rauten-Marker umgewandelt. Wie auch bei 1. und 2. wird diese Umwandlung durch Scannen irreversibel aufgelöst.
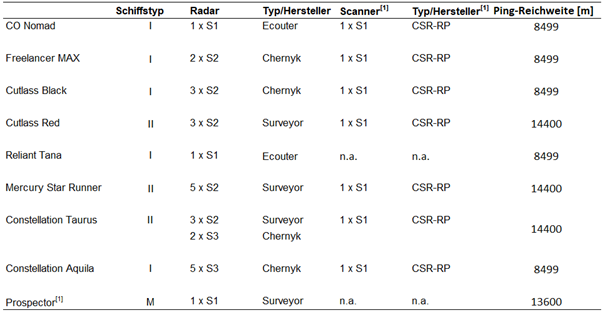
3. Experimentelle Durchführung
Mit einem Schiff nach Tab. 2 werden typische Abbaugebiete der unterschiedlichen Gesteinsklassen angeflogen. Zu unterscheiden sind dabei der Abbau auf Mond- und Planetenoberflächen sowie der Abbau in Asteroidengürteln. Zu den bekannten und vielversprechenden Abbaugebieten auf Monden gehören die Oberflächen der Hurston Monde Arial und Aberdeen, der MicroTech Monde Caliope und Clio, sowie die der Monde Lyria bei ArcCorp und Daymar bei Crusader. Asteroiden-Bergbau hingegen kann im Gürtel des Crusader Mondes Yela oder im Aaron-Belt betrieben werden.
Im Abbaugebiet angekommen wird vorzugsweise ein Richtungsmarker zur Orientierung gesetzt, wobei es im Raum immer vorteilhaft ist, sich entgegengesetzt zur Sonne zu bewegen, um die Sichtbarkeit von Objekten zu erhöhen und die Orientierung im Raum zu erleichtern. Auf Monden wird eine Flughöhe empfohlen, die bei ausreichend Abstand zur Oberfläche noch eine gute Sichtbarkeit von Bodenstrukturen und auftretenden Hindernissen erlaubt.
Anschließend versetzt man das Schiff je nach Messvorhaben in den Scan- oder Mining-Modus, sofern verfügbar und überprüft die Einstellung des Ping-Winkels. Für einen Rundum-Scan dient die Einstellung 360°, wobei wir in unseren Untersuchungen jedoch aus praktischen Gründen die Einstellungen 179° bzw. 90°, d.h. ein Ping-Signal, dass im Halb- bzw. Viertelkegel nach vorn gerichtet ist, bevorzugen, da wir uns grundsätzlich in Richtung unseres gesetzten Markers bewegen wollen.
Wird ein Echo unseres Ping-Signals empfangen, zeigt das HUD die Lage von Objekten, die das Echo ausgelöst haben, nun typischerweise mit einem 3D-Box-Marker in einer Punktwolke an. Zusätzlich erhält man je nach Distanz zu den Objekten eine Entfernungsinformation in [km] oder [m], die sich mit weiteren Pings in die gleiche Richtung auch noch einmal – in der Regel jedoch eher geringfügig –verändern kann.
Nun richtet man sein Schiff in unbewegter Schwebe auf einen ausgewählten 3D-Box-Marker aus. Bei Oberflächenscans im Rahmen dieser Untersuchungen wird dabei aus Sicherheitsgründen ein negativer Pitch von -5° bis -10° empfohlen, da Entfernungen gemessen werden sollen und das Schiff in der Regel sowohl vorwärts als auch rückwärts geflogen werden muss. Es ist sicherzustellen, dass im Rückwärtsflug keine Hindernisse auftreten. Auch ist darauf zu achten, dass Messungen vorzugsweise bei ruhigen Wetterverhältnissen erfolgen, so dass kein Abdriften auftritt. Dies kann präzise Entfernungsmessungen zum Teil merklich erschweren.
So ausgerichtet wird nun durch wiederholtes Pingen die Signalstärke des Echos im Bereich 10% – 80% für alle Ping-Winkel in der Reihenfolge 2°, 5°, 11°,22°,45°,179° und 360° bestimmt und notiert. Die Reihenfolge beginnt dabei aus praktischen Gründen mit dem kleinstmöglichen Ping-Winkel, da dies sicherstellt, dass unabhängig von der Ausgangsentfernung zum Objekt stets eine messbare Signalstärke erhalten wird. Es ist wichtig zu beachten, dass abhängig von der verwendeten Radar-/Scanner-Hard- und Software nach jeder Winkeleinstellung unter Umständen ein erneuter Ping erforderlich ist, um die korrekte Signalstärke im HUD-Display zur Anzeige zu bringen.
In unseren Messungen beträgt der absolute Fehler bei geringen Entfernungen und hohen Signalstären etwa +/- 5 m, bei großen Entfernungen und geringen Signalstärken etwa +/- 25 m. Daher kann ein durchschnittlicher absoluter Fehler von +/- 15 m bei allen Messungen als plausibel angenommen werden.
Soll zusätzlich zu den Signalstärken auch die Qualität und Präzision der Anzeige der Cockpit-Marker (3D-Box, weiße Raute, Stein- und Diamantsymbol) erfasst werden, ist es wichtig, dass das Objekt nicht gescannt wird. Denn damit wird der 3D-Box- bzw. Rauten-Marker in Abhängigkeit von der Entfernung und den Scan-Stufen als Stein- bzw. Diamantsymbol(e) aufgelöst und die entsprechende Information in der Schiffsdatenbank gespeichert. Unabhängig von der Entfernung und bis zur Maximaldistanz werden dann konsequenterweise für ein erfasstes Objekt keine 3D-Boxen und Rauten-Marker, sondern Stein- und Diamantsymbol inklusive erhaltener Scaninformationen, wie zum Beispiel Masse, Objekteigenschaften und Rohstoffinhalte angezeigt. Die Auflösungsgenauigkeit der Umwandlung aller Marker und Symbole ineinander liegt bei +/- 1m.
Zur Erfassung der Scanstufen empfiehlt es sich, je nach Entfernung, einen Scan-Winkel einzustellen, bei dem die erfasste Signalstärke anfangs <10% beträgt. Sodann fliegt man das Schiff auf das Objekt zu und notiert in Zehnerschritten der Signalstärke, welche Information bei 10%, 20%, … 80% jeweils durch Scannen erhalten werden kann.
Bei den schließlich größten Entfernungen und damit schwächsten Signalstärken werden vorzugsweise außerdem die Ping-Reichweiten erfasst. Die Genauigkeit mit der die Ping-Grenzen festgestellt werden können, richtet sich nach der Genauigkeit der Entfernungsangabe zum Objekt im Cockpit-HUD und beträgt +/- 1m für Entfernungen unterhalb 10 km und +/- 100 m für Entfernungen darüber.
4. Ergebnisse
4.1 Ping-Reichweite
Klasse-1-Gesteine auf Mondoberflächen und in Asteroidengürteln wurden mit Standardschiffe des Typs I bis zu einer Entfernung von maximal 8.499 m +/- 1 m, mit der Prospector als Vertreter der Mining-Schiffe bis zu einer Entfernung von maximal 13.6 km +/- 0,1 km gefunden. Constellation Taurus, Mercury Star Runner und Cutlass Red erzielen als Vertreter der Standard-Schiffe des Typs II Ping-Reichweiten bis zu 14,4 km +/- 0,1 km. In allen untersuchten Fällen ist die Ping-Reichweite unabhängig vom Ping-Winkel.
In einigen Fällen konnten Anomalien in den Ping-Reichweiten festgestellt werden, die wir nach ihrem Entdecker als „Alaska-Anomalien“ bezeichnen und deren Ursache im Rahmen der vorliegenden Untersuchung nicht aufgeklärt werden konnten. Diese sind reproduzierbar und scheinen unabhängig vom Schiff und den verwendeten Hardware-Komponenten vornehmlich bei Ping-Winkeln im unteren Bereich auf Mondoberflächen als auch im Aaron-Belt aufzutreten.
Die Ping-Grenze der Klasse-1-Gesteine ist ferner unabhängig von deren Masse und Inhalt stets die Gleiche. Tab. 5 ist zu entnehmen, dass sie ebenfalls unabhängig von der Anzahl der sie verursachenden Einzelsteine ist.
4.2 Signalstärken, Scan-Stufen und Cockpit-Marker
Die Signalstärke nimmt bei konstantem Ping-Winkel linear mit der Entfernung ab.

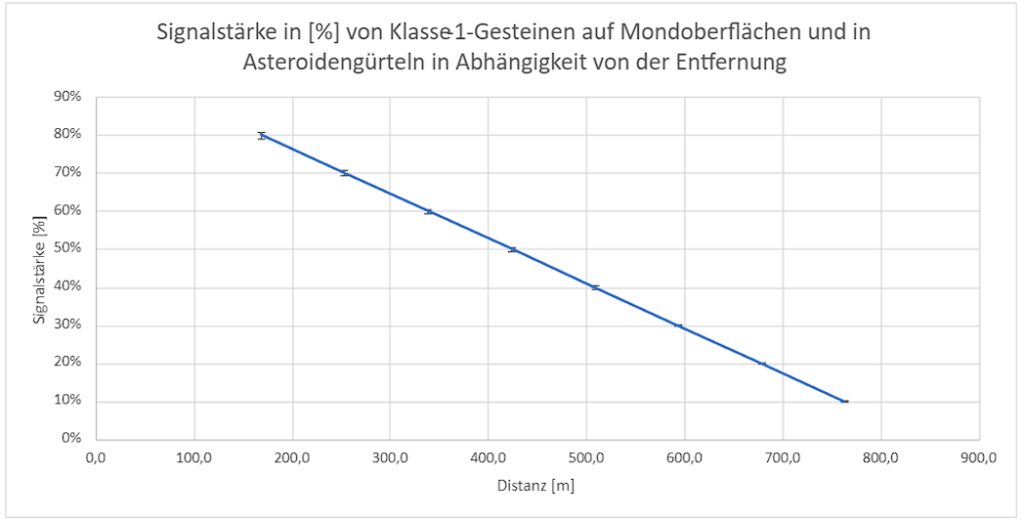
Die Signalstärke ist abhängig vom Ping-Winkel: Je kleiner dieser, desto größer ist die Entfernung zum Objekt bei gegebener Signalstärke. Dies bedeutet, dass die Scan-Stufen bei kleineren Winkeln in größerer Distanz zum Objekt liegen und damit bereits aus größerer Entfernung Daten zum Objekt zugänglich sind.
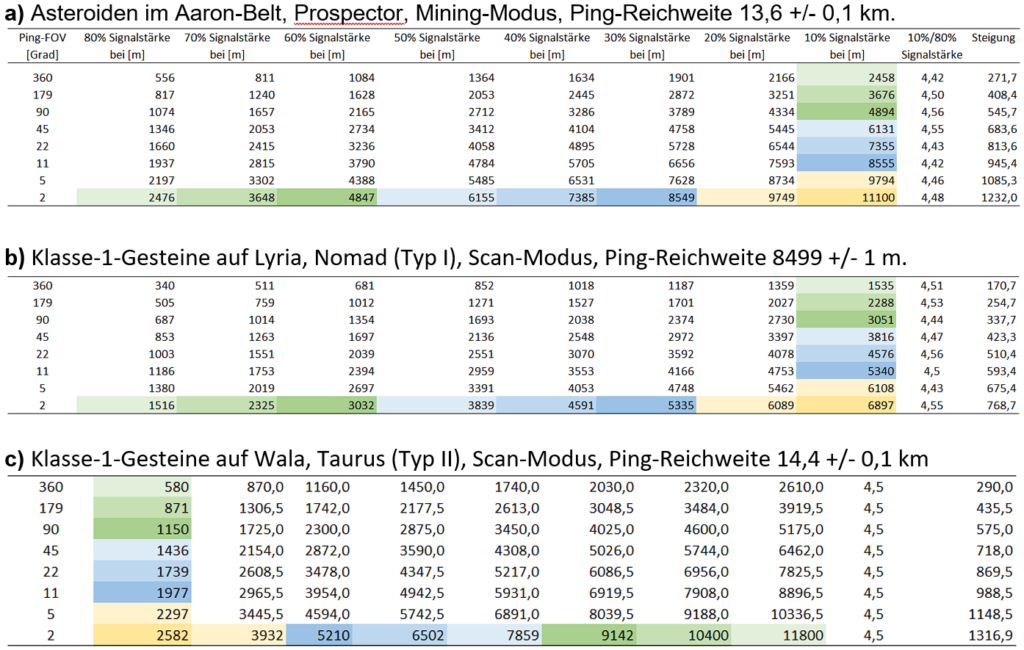
Betrachtet man die gemessenen Distanzen, so fällt auf, dass sich die Signalstärke bei konstantem Ping-Winkel in der gleichen Weise verändert, wie bei konstanter Zehner-Prozentzahl und variablem Ping-Winkel. Dies gilt paarweise, also für 2°/10%, 5°/20%, 11°/30%, …, bis 360°/80%. Da sich das Verhältnis der Signalstärken von 10% und 80% stets zu 4,5 ergibt und damit konstant ist, lassen sich bei Kenntnis der Signalstärken von nur einer Spalte oder einer Zeile der Tab. 6 nach Ermittlung der Geradensteigungen für alle Ping-Winkel sämtliche Werte mit guter Genauigkeit (Fehler ≤ 2%) berechnen. Dies verringert den damit verbundenen Messaufwand erheblich und wurde im Fall der Constellation Taurus in Tab. 7c) angewendet.
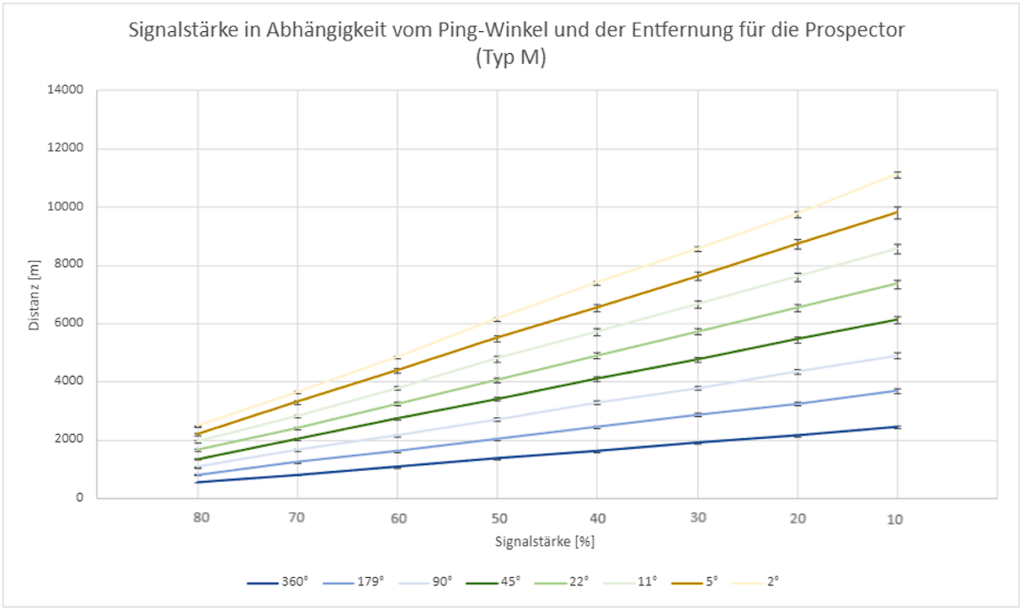
In Abb. 4 sind die winkelabhängigen Signalstärken dargestellt, die mit der Prospector im Scan-Modus im Aaron-Belt ermittelt wurden. Aufgrund von Vergleichsmessungen wie exemplarisch in Tab. 8 aufgeführt, können wir schlussfolgern, dass es keinen Unterschied macht, in welchem Modus oder an welchem Ort Klasse-1-Gesteine bzw. Asteroiden gemessen werden.

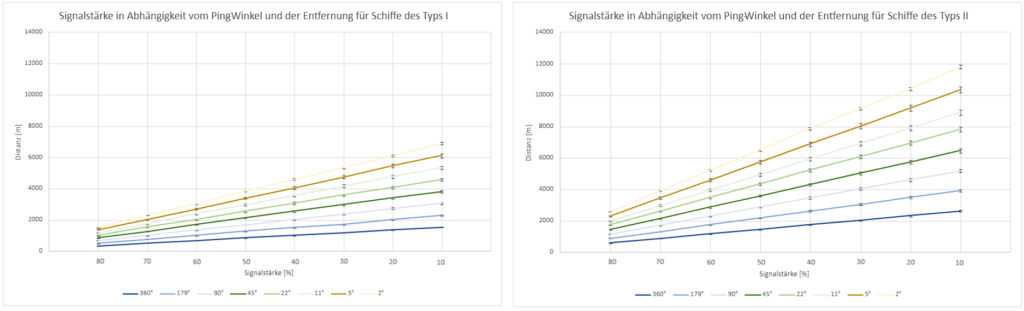
In Analogie zu Tab. 7 und Abb. 4 lassen sich nun auch Diagramme für die winkel-abhängigen Signalstärken für Schiffe des Typs I und des Typs II mit Ping-Reichweiten von 8,5 km bzw. 14,4 km aufstellen. Das Ergebnis ist in den Abb. 5a und 5b dargestellt.
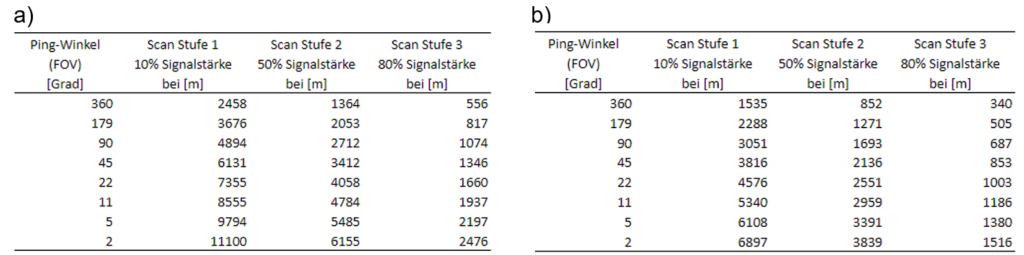
Mit diesen Ergebnissen betrachten wir die Signalstärken der verfügbaren Schiffe in Star Citizen zu diesem Zeitpunkt als erfasst und klassifiziert und wenden uns den Scan-Stufen zu. Aus Tab. 7a und b sowie Abb. 6. wird deutlich, dass Gesteine vorzugsweise mit kleinstem Ping-Winkel erfasst und gescannt werden, um somit aus größtmöglicher Entfernung und damit möglichst frühzeitig erkennen zu können, welche Rohstoffe in ihnen enthalten sind. Da beim Asteroidenmining mit der Prospector im Mining-Modus an der ersten Scan-Stufe zusätzlich der Asteroidentyp erfasst wird, lassen sich Quantanium-Vorkommen somit bereits aus 11,1 km erkennen.
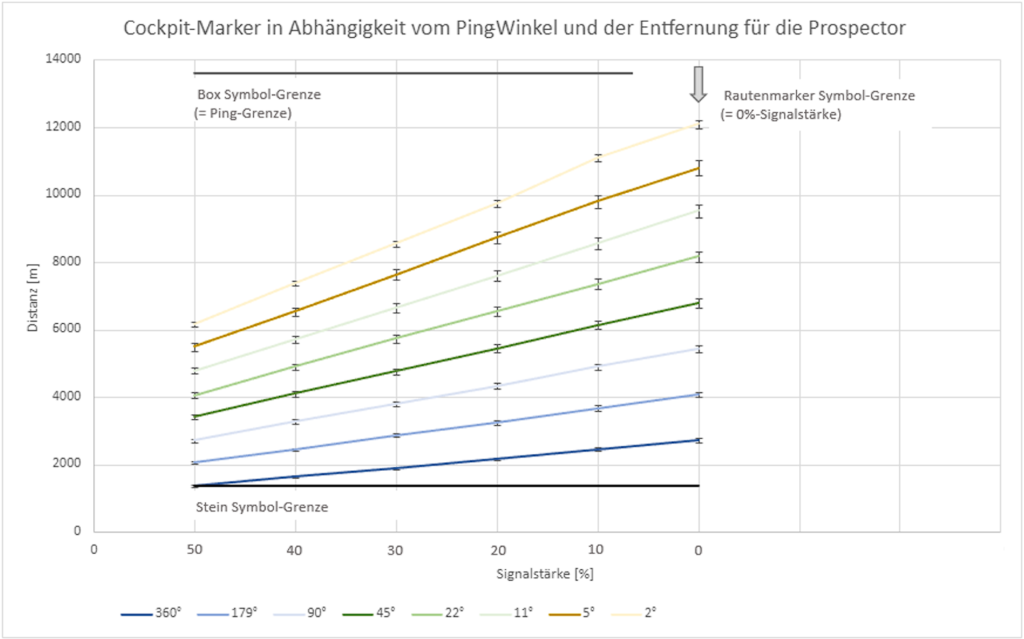
Abschließend wollen wir noch die Cockpit-Marker betrachten. Detailergebnisse dazu sind für die Prospector in Tab. 8 aufgeführt.
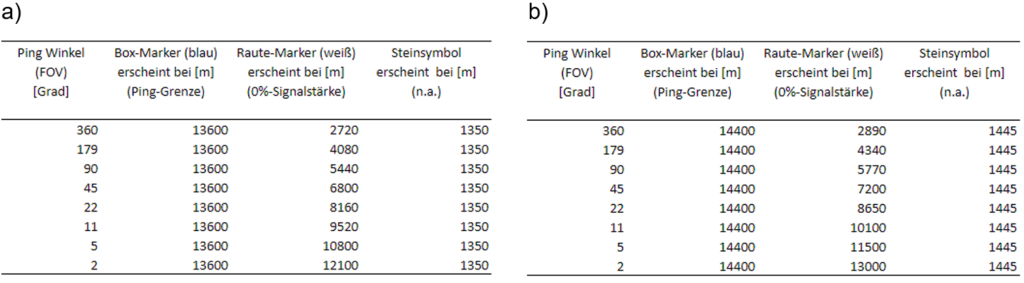
Trägt man die Daten für die Prospector grafisch auf und vergleicht sie mit den bisherigen Ergebnissen, so lässt sich festhalten, dass Box-Marker stets an der Ping-Grenze erscheinen. Die Entfernung, bei der weiße Rautenmarker sichtbar werden, lässt sich durch Extrapolation derjenigen Entfernung zuordnen, bei der die Signalstärke gerade 0% beträgt. Die Entfernungen, bei denen sich diese in Steinsymbole auflösen, können wir nach bisheriger Datenlage jedoch noch nicht zuverlässig angeben. Möglicherweise entspricht sie der 50% Signalstufe des kleinsten Ping-Winkels.
5. Diskussion und Schlussfolgerungen
In dieser Arbeit wurden die entfernungs- und winkelabhängigen Signalstufen an Klasse-1-Gesteinen für verschiedene Schiffe bestimmt. Die Schiffe wurden dazu die in Klassen des Typs I, II und M eingeteilt. Diese Einteilung und ihre zugehörigen Ergebnisse ermöglichen es in Kombination mit den identifizierten Scan-Stufen von 10%, 50% und 80% in einfacher Weise abzulesen, bei welchen winkelabhängigen Distanzen zum erfassten Objekt teilweise und vollständige Scans je nach Schiffstyp und Ausstattung ermöglicht werden. Dies gestattet eine erhebliche Beschleunigung beim Erkennen und Identifizieren der gewünschten Ressourcen im Rahmen des Mining-Gameplays.
- a) Asteroiden-Mining
Hier macht man sich beim Solo-Gameplay die spezifische Fähigkeit der Prospector zu Nutze, den Asteroidentyp, im Gegensatz zum Gesteinstyp beim Mining auf Oberflächen, schon an der Symbol-Grenze des Rautenmarkers (0%-Grenze der Signalstärke) von 12,1 km bei kleinstem Ping-Winkel und damit aus sehr großer Entfernung feststellen zu können. Vorzugsweise achtet man dabei lediglich auf den Typ Q, da er den derzeit gewinnbringendsten Rohstoff Quantainium enthält. Außerdem lässt sich in dieser Distanz auch feststellen, ob es sich um ein einzelnes oder mehrere Gesteine handelt, da wie oben dargestellt, der entsprechende 3D-Boxmarker in ein oder mehrere Rautensymbole aufgelöst wird. (Eine Tatsache, die man sich beim Oberflächen-Mining ebenfalls zu Nutze machen kann, vgl. unten.) Zusätzlich wissen wir bei Anzeige des Asteroidentypen auch, ob das Gestein überhaupt scannbar und somit auch abbaubar ist.
Erfahrene Bergbauer fliegen nach Erfassung des Typen gegebenenfalls auch nur bis zur 2. Scan-Stufe heran, da an dieser bereits die Gesteinsstabilität gescannt und aus ihr auf den Quantainiumgehalt geschlossen werden kann. Dadurch können interessante von uninteressanten Gesteinen schnell und effizient unterschieden werden.
Siruck hat zum Asteroidenmining ein Videotutorial erstellt, das dies verdeutlicht und zur Ansicht bereit steht [2].
Insgesamt ist diese Methode inzwischen relativ weit in Star Citizen verbreitet. Unseres Wissens nach geht sie auf Sniping Jet zurück [4], [5]. Die Ergebnisse der vor-liegenden Arbeit untermauern die Strategie und liefern darüber hinaus die quantitativen Zusammenhänge bei der aktuellen Scan- und Ping-Mechanik in der Version 3.17.2.
- b) Oberflächen-Mining
Unter Ausnutzung der Tatsache, dass Quantainium-Gesteine häufig in Gruppen vorkommen, lässt sich bei Auflösung eines Box-Markers in mehrere Rautensymbole oft darauf schließen, dass dort Quantainium zu finden ist. Dies trifft auf Oberflächen an erfahrungsgemäß quantainiumreichen Orten, wie praktisch überall auf der Oberfläche von Lyria zu. Nach Tab. 8a) gelingt diese Auflösung mit der Prospector im Mining-Modus bereits bei 12,1 km, so dass solche Vorkommen bereits aus großer Distanz und mit relativ hoher Wahrscheinlichkeit erkannt werden können. Demo-Videos dazu finden sich von Siruck [3] und von SpaceShorts [5] auf Youtube.
6. Quellenverzeichnis
[1] Star Citizen Wiki Deutsch. Hinweis: Die deutsche und englische Version der Star Citizen Wiki unterscheiden sich in diesen Angaben.
[2] Siruck, Youtube, 2022, „Fokussierter direkter Mining-Ping zur schnellen Typenerkennung aus 10km +“, https://youtu.be/LANAcn2zG1s
[3] Siruck, Youtube, 2022, „Quantaniumcluster auf Lyria mit dem Ping aufspüren“, https://youtu.be/lpv9vbsMBZE
[4] Sniping Jet, Youtube, 2022, https://www.youtube.com/watch?v=Ot7Zh3lZyQ0&t=0s
Dieses Video ist nicht mehr verfügbar, siehe dazu [5].
[5] SpaceShorts, Youtube, 2022, https://youtu.be/_48GhSXGf-g